VDA 5050 is the definition of a communication interface for Driverless Transport Systems. Currently (as of August 2021), the interface is in version 1.1 from June 2020 and was defined in a cooperation between the German Association of the Automotive Industry (VDA) and the German Association for Materials Handling and Intralogistics (VDMA). The communication interface is used to exchange status and order data between autonomous guided vehicles (AGV) and a central control system.
The VDA 5050 is designed as a universally applicable interface to
- easily integrate new vehicles into an existing control station
- simplify the integration of new AGVs in parallel to already deployed control system
- enable the parallel operation of AGVs from different manufacturers in the same work environment
Originally, the communication interface was developed with the requirements of the automotive industry in mind. However, because these requirements are so diverse even in this industry, there is still a lot of freedom for special cases, special application scenarios and individual circumstances. It follows that the control station and AGV cannot communicate with each other without problems in every case, even though they both support VDA 5050. Despite standardization, it is still necessary to check which factors should be used for communication. Nevertheless, VDA 5050 leads overall to a considerable reduction in integration effort and complexity.
Communication channels via VDA 5050
The communication channels can usually include the following participants:
- ERP/warehouse management system
- Master control or control system
- Message broker (specifically: MQTT broker)
- Driverless transport systems (AGVs) as well as fleet managers
The master controller communicates with the warehouse management system and with the ERP system. Both players in this communication are indispensable – unlike the fleet managers. The optional fleet managers are now integrated into numerous AGVs and perform tasks that can also be controlled by the control system. For example, the battery charge status can be communicated via both the control system and the fleet manager. This means that either the control system or the fleet manager instructs the corresponding AGV to drive to the charging station and recharge the battery. This responsibility must be clarified in advance. It is necessary to define precisely which aspects of VDA 5050 are to be applied in communication in this way in other AGV functionality areas as well.
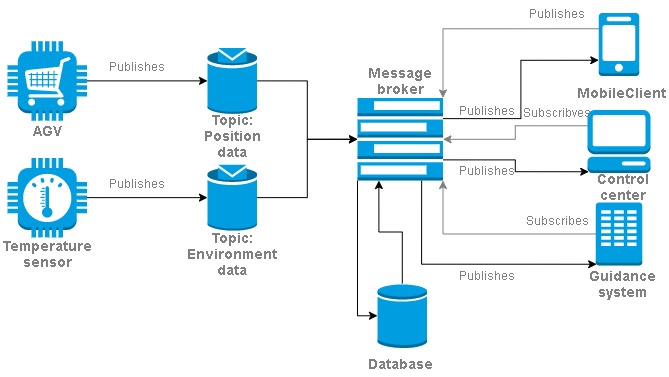
Systemisch stehen sich mit Leitsteuerung und Flottenmanagern separate Informationskomplexe gegenüber. Während die Leitsteuerung die möglichen Routen und jeweiligen Fahraufträge kennt, bilden die FTS mit den herstellerspezifischen Flottenmanagern ihrerseits auch eine Art Einheit. Es gilt also zwischen den verschiedenen Informationsagglomerationen eine Brücke zu schlagen. Dieser Notwendigkeit soll der Message-Broker nachkommen. Dieses System basiert auf mehreren Warteschlangen, die Topics genannt werden. Mithilfe dieser Funktionalität öffnet der Message-Broker die geschlossene Sphäre herstellerspezifischer Flottenmanager. Als Zwischenschicht ermöglicht er es in der Folge, weitere Hardware oder auch ein anderes System an das Leitsystem anzubinden. Beide Akteure können auf diese Weise simultan Nachrichten an ein Topic schicken sowie auch auslesen. Zum Beispiel kann ein Flottenmanager eine Nachricht an ein Topic des Message-Brokers schicken, während das Leitsystem diese Nachricht aus dem Message-Broker heraus bereits abruft.
What is the MQTT protocol?
MQTT is short for Message Queuing Telemetry Transport. It is an open network protocol for machine-to-machine (M2M) communication. Telemetry data is transmitted in the form of messages – a principle that even works when there are large delays (latency times) or limited networks are involved. An MQTT broker is a server that can act as a state database, is particularly suitable for automation solutions and is widely used in the broad field of the Internet of Things (IoT). This is where a wide variety of devices come together that can communicate data accordingly – from sensors and actuators to smartphones/handhelds and systems integrated in vehicles.
Pull principle in VDA 5050
VDA 5050 operates according to the pull principle. This means that the systems involved are not passively in a “waiting posture” until they are instructed to perform an action. Instead, the respective system must itself (and thus actively) establish a connection to the message broker and then be ready to forward, process or execute actions when a valid topic occurs. Systems that process according to the push principle must be converted accordingly. The pull principle is particularly effective in VDA 5050 because each communication participant, i.e. each system, decides for itself what type of information or message it wants to receive. In this way, the individual systems are not burdened with data that is irrelevant for them and the corresponding processes.
Conclusion
VDA 5050 is a standardized communication interface by means of which driverless transport systems can exchange status and order data between driverless transport vehicles and a central control system. In general terms, the interface makes it easy to integrate new vehicles into an intralogistics ecosystem, including AGVs from different manufacturers. This means that different automated guided vehicles, which are heterogeneous in terms of their respective systems, can be operated in parallel in a single working environment. The major advantage of this is that there is no longer any restriction to a single brand or a single system. Although this leads to some effort and possible conversions in advance, it then reduces the complexity at the operational level enormously and offers companies an immense gain in possibilities for flexible automation and individualization with regard to the AGVs used.
Other reading recommendations: